5.1 Torque and Rotational Statics
Torque & Rotational Statics
Torque is the rotational analog of force. It is the force that causes an object to rotate around its axis or pivot point. Understanding torque and its relationship with rotational statics is essential for analyzing systems involving levers, gears, and other rotational mechanics. The unit for torque is Newton-meters (N⋅m).
What is Torque?
Torque (τ) is the rotational effect of a force applied at a distance from the pivot point. It is defined mathematically as:
τ = r × F = rFsinθ
Where:
τ: Torque (N⋅m)
r: The distance (radius) from the axis of rotation to the point of force application (m)
F: The applied force (N)
θ: The angle between the force vector and the lever arm (degrees or radians)
The direction of torque follows the right-hand rule, indicating whether the torque induces clockwise or counterclockwise rotation.
Example of Torque in Action
Imagine opening a door. The farther from the hinges you push, the easier it is to open. This is because torque increases with the length of the lever arm. The equation explains why applying force perpendicular to the door results in maximum torque (since sin90° = 1).
Conditions for Rotational Equilibrium
In static systems, achieving equilibrium requires that two conditions are met:
First Condition of Equilibrium: ∑F = 0
This means the net force acting on the object is zero, ensuring no linear acceleration.
Second Condition of Equilibrium: ∑τ = 0
This means the net torque acting on the object is zero, ensuring no rotational acceleration.
Together, these conditions ensure the system is in both translational and rotational equilibrium.
Key Concepts in Torque and Rotational Statics
Direction of Torque:
Clockwise torques are typically considered negative.
Counterclockwise torques are positive.
Lever Arm:
The perpendicular distance between the axis of rotation and the line of action of the force is crucial for determining torque. A longer lever arm produces a greater torque for the same force.
Balancing Torques:
In equilibrium, the clockwise and counterclockwise torques must balance out. For example: ∑τclockwise = ∑τcounterclockwise
Moment of Inertia
Moment of inertia (I), also known as rotational inertia, measures an object’s resistance to rotational acceleration. It depends on the object’s mass distribution relative to the axis of rotation. The general formula for moment of inertia is:
I = ∑mr²
Where:
m: Mass of each particle (kg)
r: Distance of the particle from the axis of rotation (m)
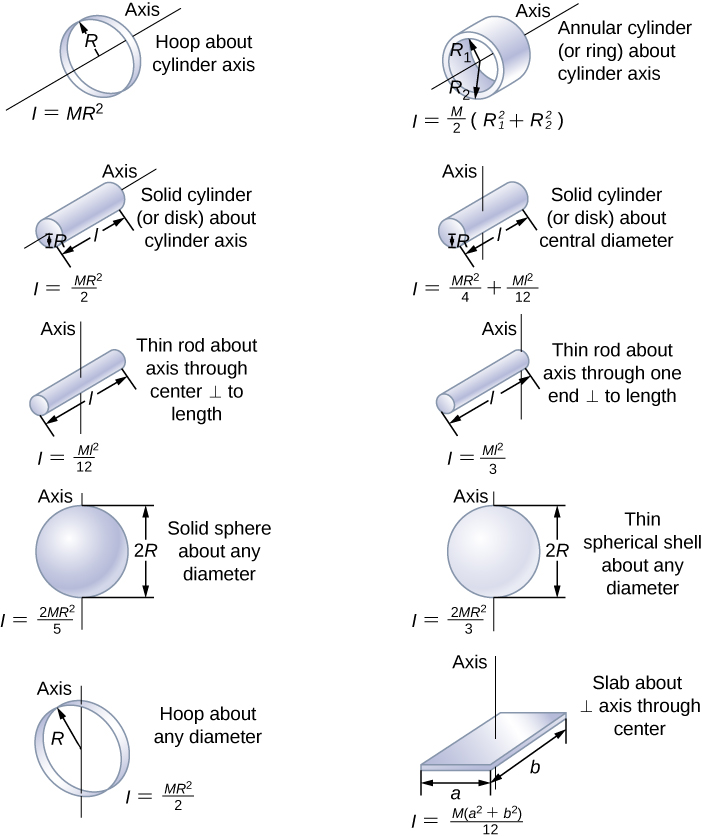
Common Moments of Inertia
Rod (axis at the center): I = (1/12)ML²
Rod (axis at one end): I = (1/3)ML²
Solid disk: I = (1/2)MR²
Hollow cylinder: I = MR²
Solid sphere: I = (2/5)MR²
Hollow sphere: I = (2/3)MR²
These formulas are essential for solving problems involving rotational dynamics.
Parallel Axis Theorem
The parallel axis theorem allows us to calculate the moment of inertia when the axis of rotation is shifted from the center of mass. It is expressed as:
I = Icm + Mh²
Where:
I: Moment of inertia about the new axis
Icm: Moment of inertia about the center of mass
M: Mass of the object (kg)
h: Distance between the center of mass and the new axis (m)
Application
If you’re designing a rotating machine or analyzing the stability of structures, the parallel axis theorem simplifies calculations when the axis of rotation isn’t at the center of mass.
Practice Problems
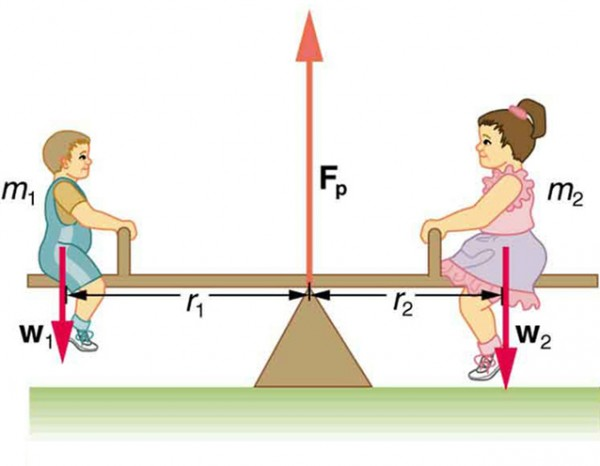
Problem 1: Balancing Torques
Two children push on opposite sides of a door during play. Both push horizontally and perpendicular to the door. One child applies a force of 17.5 N at a distance of 0.6 m from the hinges. The second child pushes at a distance of 0.45 m. What force must the second child apply to keep the door from rotating?
Solution: Using ∑τ = 0 for equilibrium:
17.5 N × 0.6 m = F2 × 0.45 m
F2 = (17.5 N × 0.6 m) / 0.45 m F2 = 23.33 N
Problem 2: Moment of Inertia
Calculate the moment of inertia of a solid disk (mass = 2 kg, radius = 0.5 m) rotating about its center.
Solution: Using the formula for a solid disk:
I = (1/2)MR² I = (1/2)(2 kg)(0.5 m)² I = 0.25 kg⋅m²
Problem 3: Parallel Axis Theorem
A uniform rod of mass 4 kg and length 2 m has a rotational inertia of (1/12)ML² about its center. Find its moment of inertia if the axis is shifted to one end.
Solution: Using the parallel axis theorem:
I = Icm + Mh² Icm = (1/12)ML² = (1/12)(4 kg)(2 m)² = 1.33 kg⋅m² h = L/2 = 1 m
I = 1.33 kg⋅m² + (4 kg)(1 m)² I = 1.33 kg⋅m² + 4 kg⋅m² I = 5.33 kg⋅m²
Real-World Applications
Engineering: Torque calculations are crucial in designing engines, turbines, and bridges to ensure structural stability and efficiency.
Sports: Understanding torque helps improve performance in sports like baseball (pitching), gymnastics (spins), and cycling (pedaling).
Astronomy: Torque and rotational statics explain the stability and rotation of celestial bodies like planets and stars.
Conclusion
Torque and rotational statics form the foundation of understanding rotational motion. By mastering concepts such as torque, moment of inertia, and equilibrium conditions, you can analyze and predict the behavior of rotating systems, from simple levers to complex machinery. This knowledge has vast applications in engineering, physics, and everyday life, making it a vital topic in the study of mechanics.